Useful Uselessness? Teaching Robots to Knit with Humans
I am super excited that my first Pictorial was published at ACM DIS 2020. Fantastic colleagues at TU Berlin around Pat Treusch taught a commercially available robot to knit with them and with this pictorial Pat Treusch, Daniela Rosner and myself collectively reflect on this process through the visual format of an ACM Pictorial.
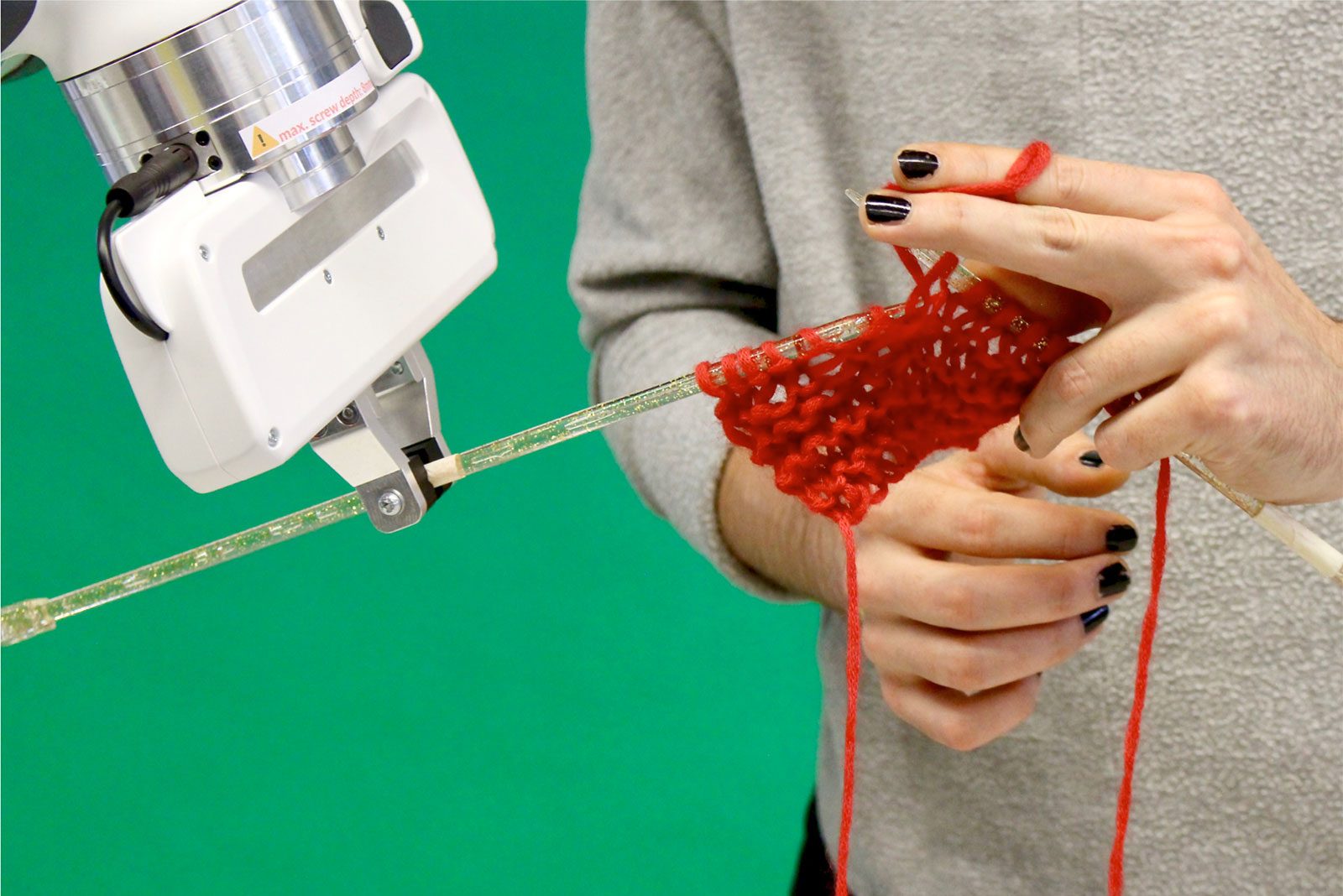
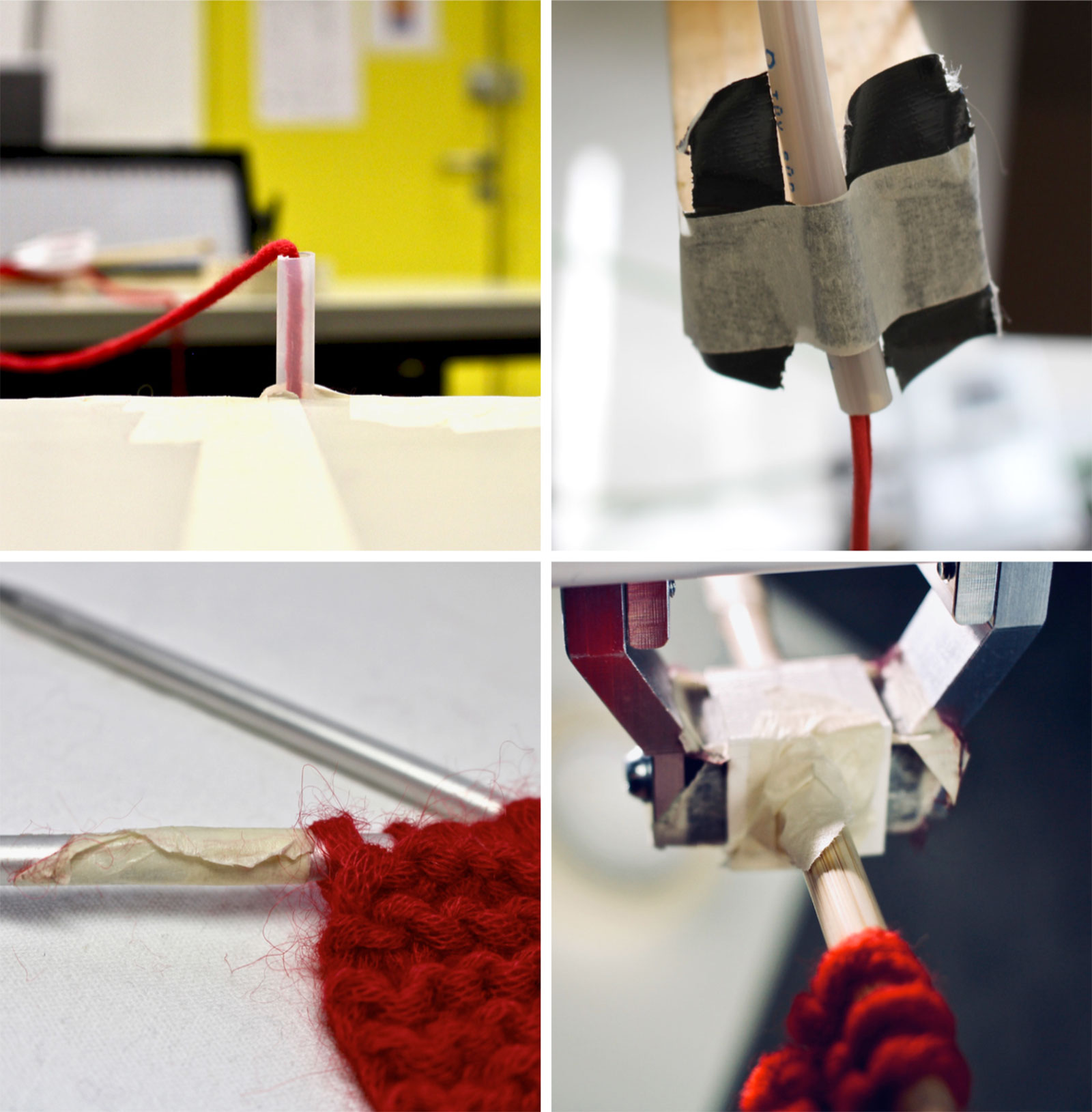
This pictorial uses imagery of human-robot collaboration, or cobots, as a site to examine the potential of queer use within design research. Through close documentation of our process, we reflect on acts of teaching a commercially available robot to knit with us—a messy and seemingly unproductive process. However, this uselessness of the chosen task allows us to re-consider the idealization of robotic collaboration. We question the optimization of a largely human labor force and the associated drive to increase efficiency within a range of sectors, from the service industry to industrial production. Building on non-use literatures examining technological limits, and drawing on performative explorations and critique, we show how knitting enlarges our capacity to visualize what might be a suitable use case for cobots.
Pat Treusch, Daniela Rosner and Arne Berger. 2020. Useful Uselessness? Teaching Robots to Knit with Humans. In Proceedings of the 2020 DIS Conference on Designing Interactive Systems (DIS) 2020. ACM. New York. USA ISBN 978-1-4503-6974-9/20/07. https://doi.org/10.1145/3357236.3395582